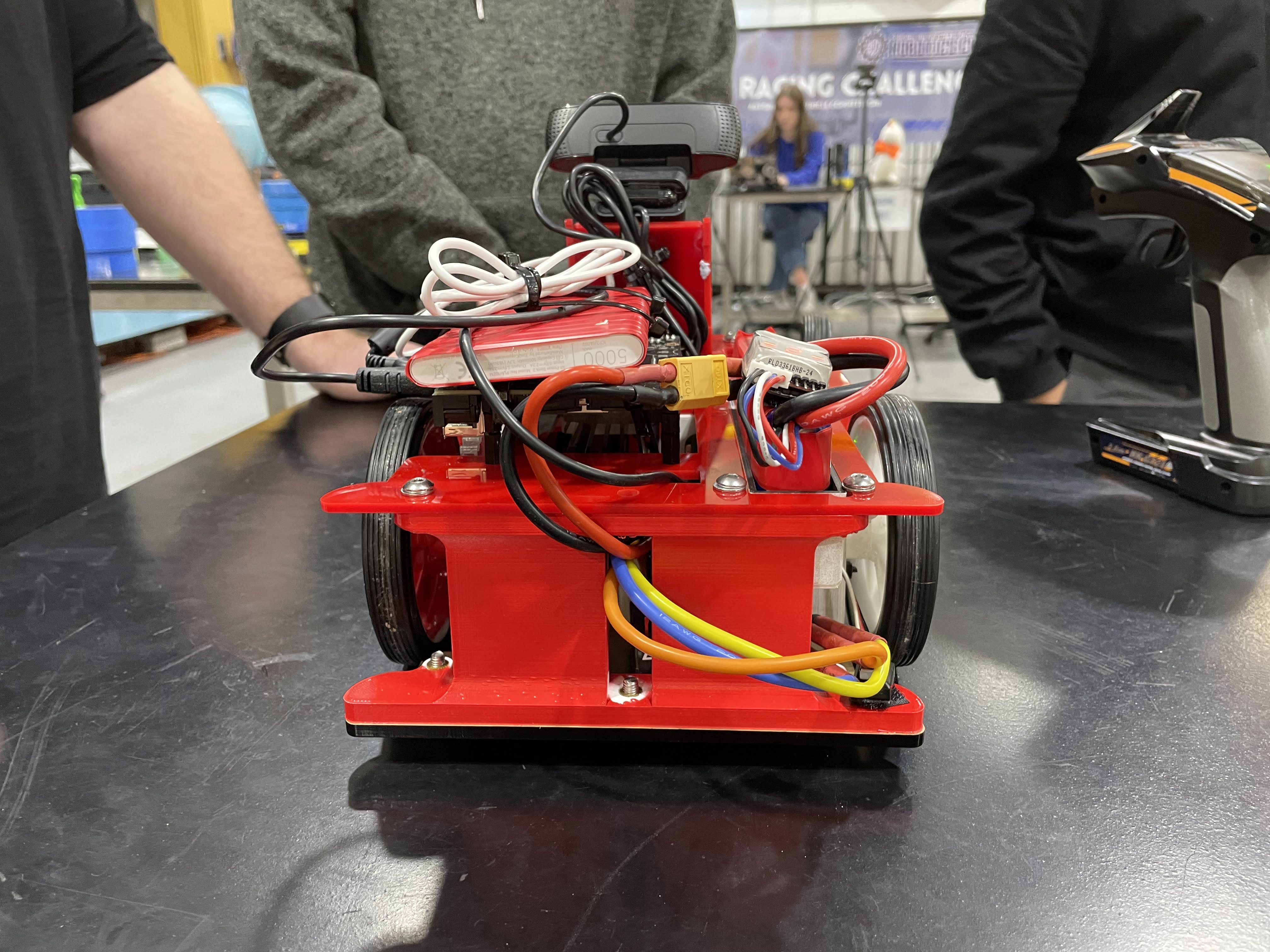
This group project was an exciting competition I participated in during my first year at university. As an eager first year student, I joined the UTS Robotics Society and decided to participate in their entry to QUT's Droid Racing Competition (DRC).
DRC is an annual robotics competition organised by the QUT Robotics Club. It challenges teams to design, program, and race autonomous ground-based robots capable of navigating a track using computer vision.
Shortly after signing up, dynamics within the society changed and participation levels dropped. Due to this, I found myself unexpectedly with the responsibility of 'team lead' due to my zeal and prior experience with Arduino, 3D printing and Laser cutting experience.
The team assembled was predominantly first year Mechatronic students and our entry came 3/17 groups.
My contribution
- Team lead ~ defined and delegated tasks to group members
- Lead the mechanical and system design/integration
- Wrote the Arduino control logic for a wireless remote E-stop and relay Nvidia Jetson CV control logic to motors
- Reported to UTS Robosoc executives with team progress and sought support from UTS Engineering and IT Faculty
- After this competition, I then became the Marketing executive for UTS Robosoc creating and publishing promotional media for the society to increase student awareness and engagement
Interesting information:
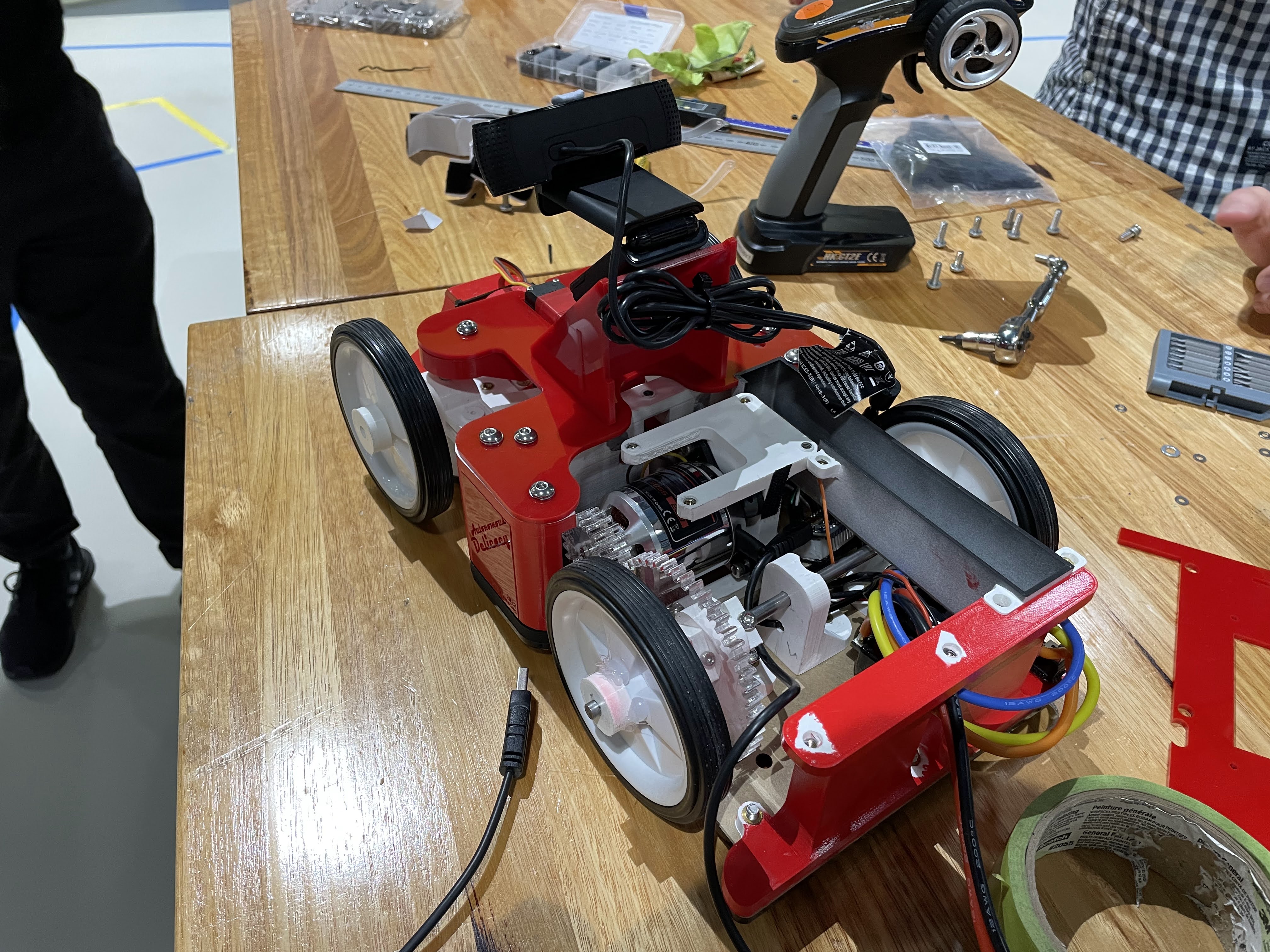
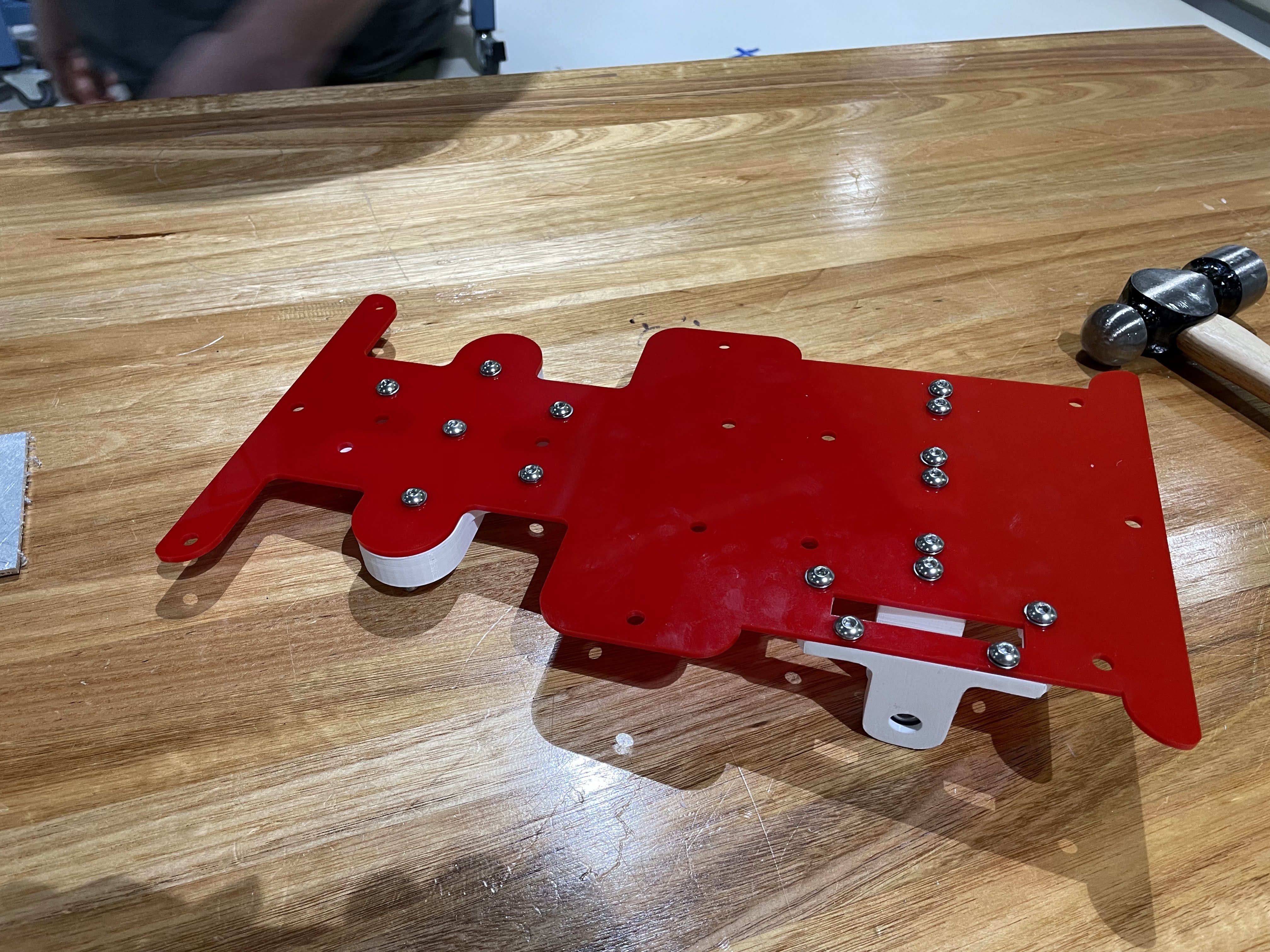
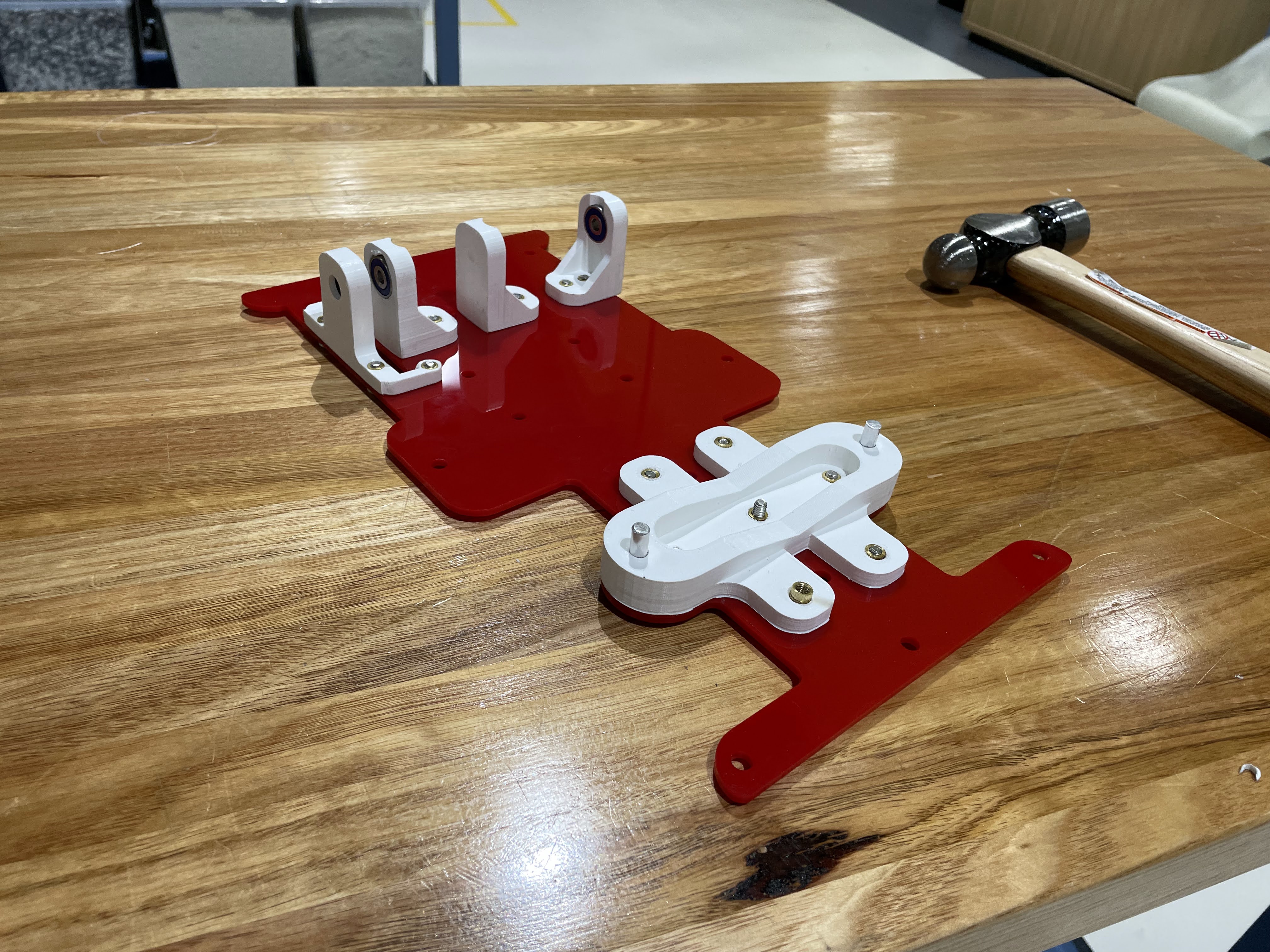
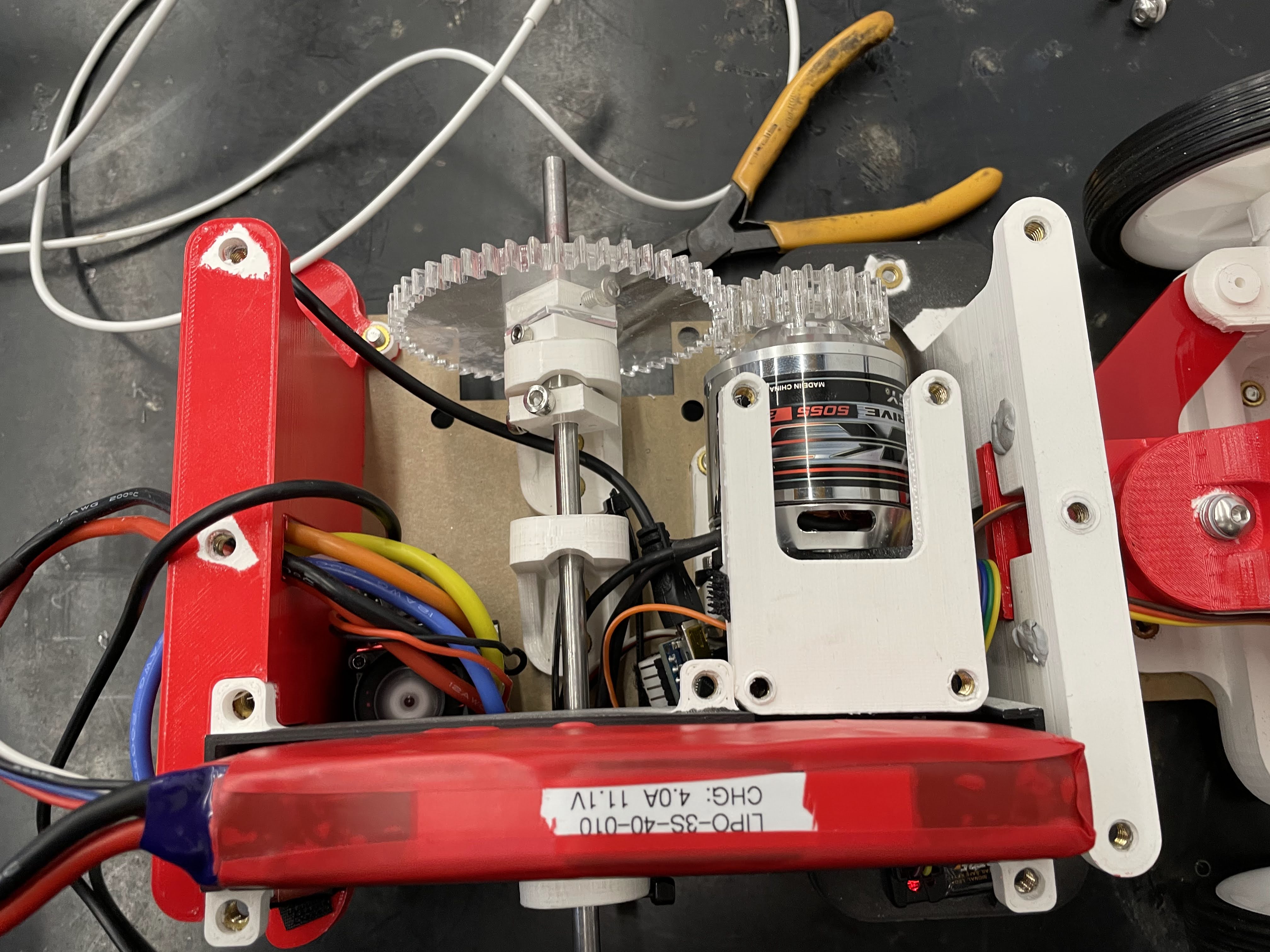
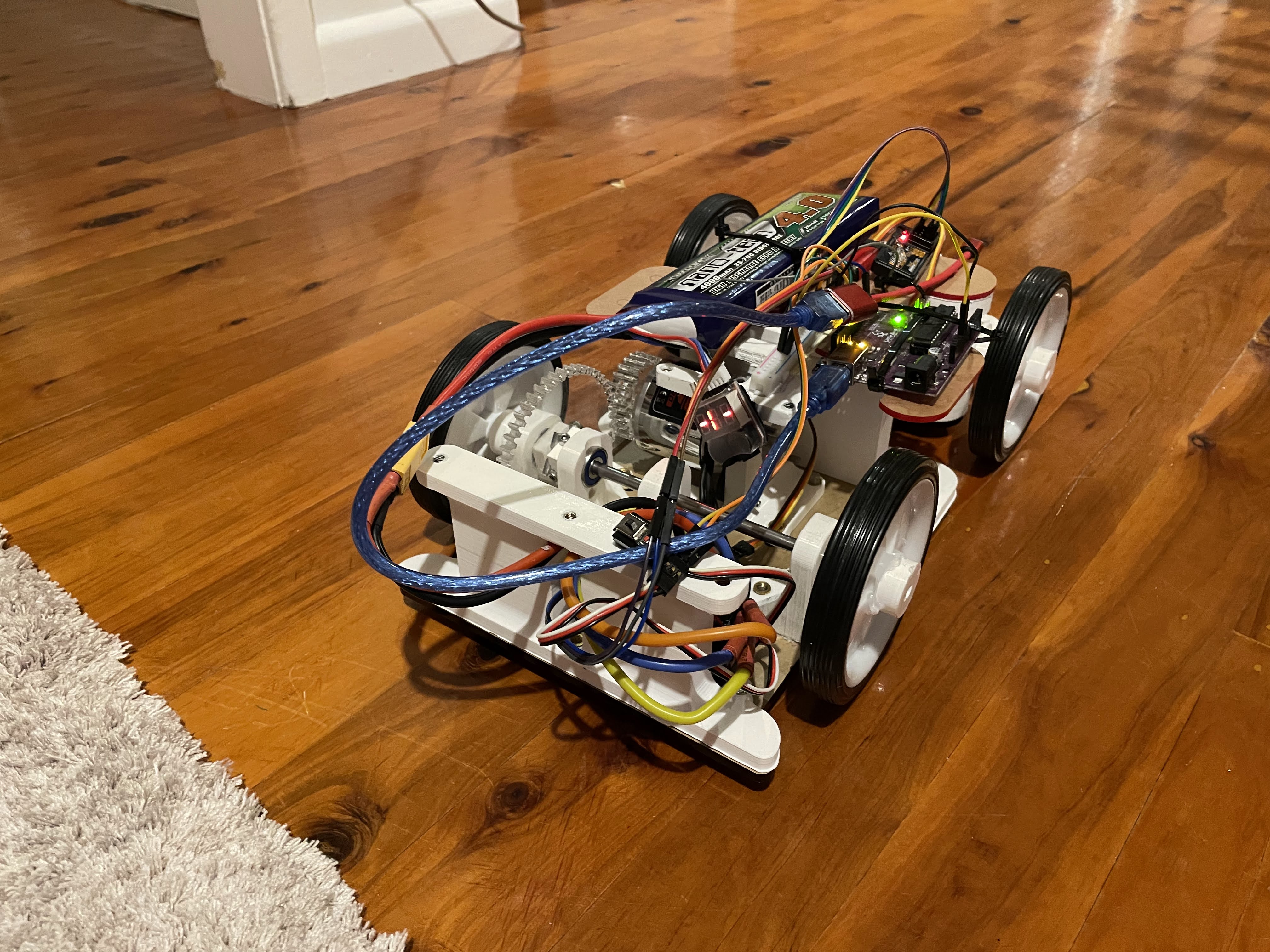
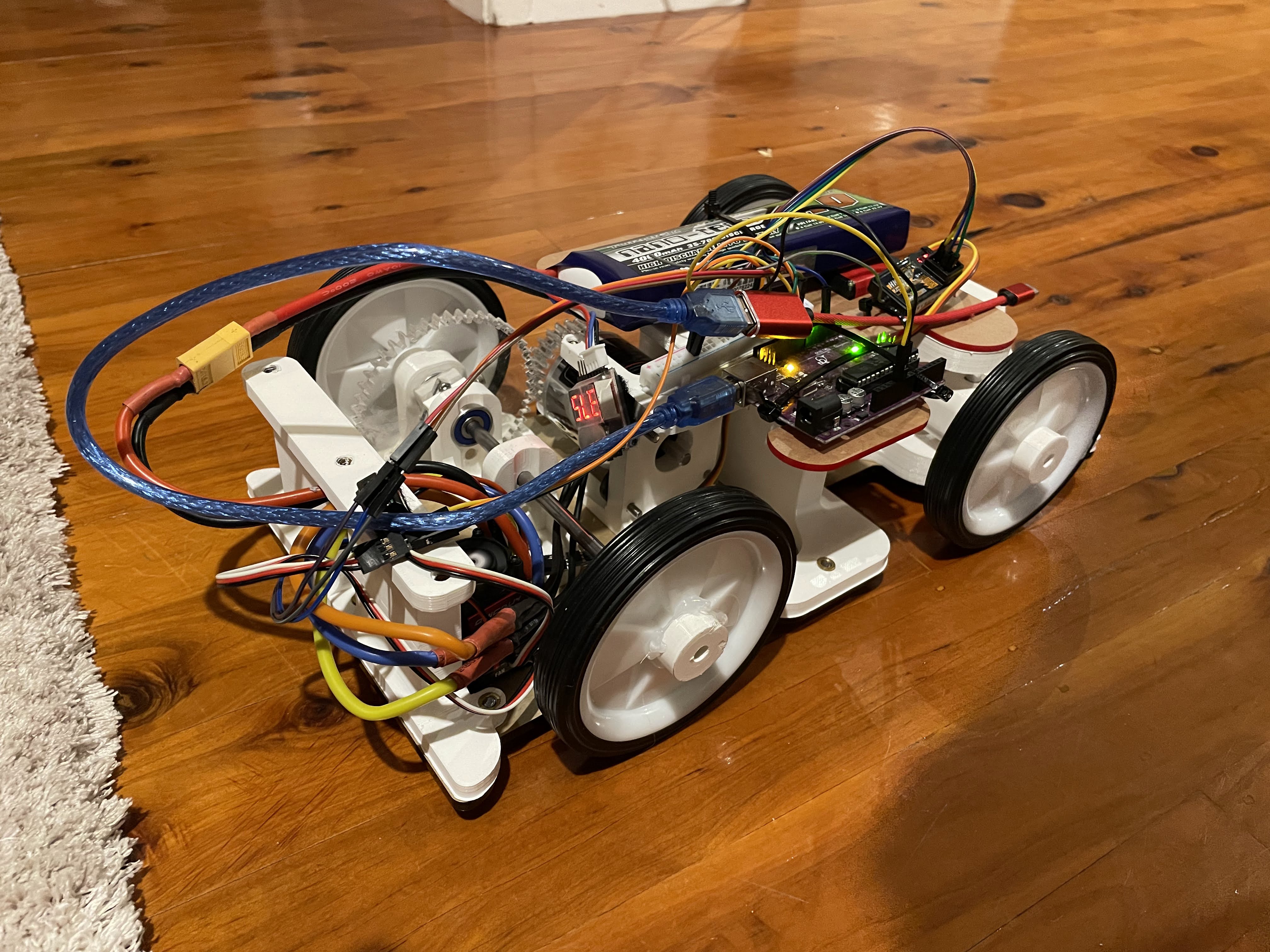
- Our entry was a chassis completely designed by our group including the steering (Ackerman) and drivetrain. Most competitors often purchase an already existing RC car kit and modify it to meet their autonomous needs. Our group decided it would be more beneficial to design the chassis and mechanisms completely from scratch. This allowed us to design a tight turning radius and gain much experience using the Mechanical CAD platform UTS provided us, Solidworks.
- The compact and flush design of our droid impressed many peers with many compliments and admiration that our robot could actually fit within a back-pack for easy transport.
- Driving control logic was determined by a simple python script that observed the positions of the yellow (left) and blue (right) tape on either side of the track. A Nvidia Jetson Nano was used for the compute module.
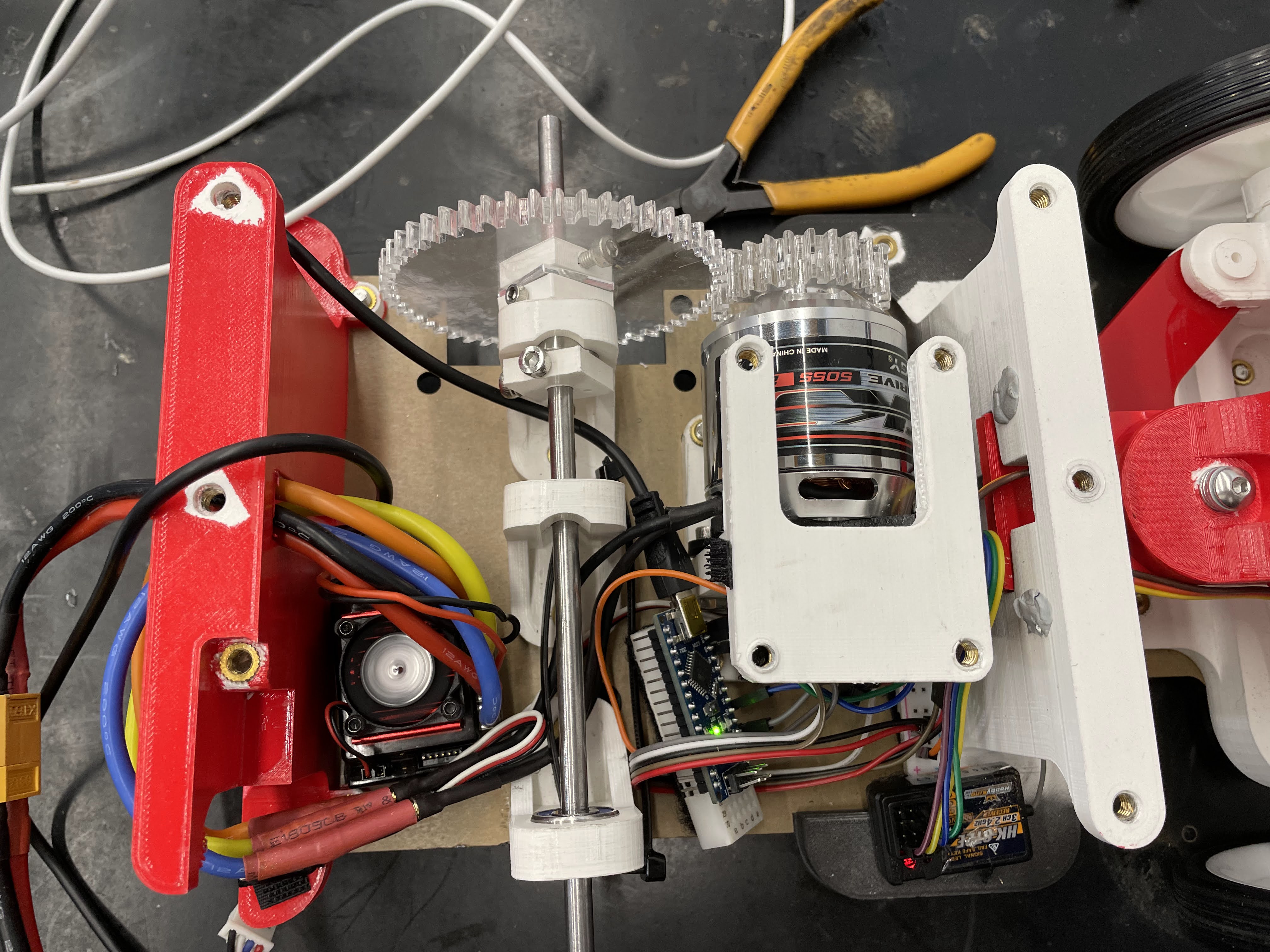
- An Arduino nano was used to read driving commands from the Jetson Nano, relay the appropriate commands to the motors and listen for a wireless E-stop remote.
- Using gears as our drivetrain resulted in a critical design flaw that resulted in the droid being speed limited due to no breaking ability. This slowed our performance, particularly with navigating tight corners. If the team was to re-attempt the competition, a belt driven drivetrain is of interest.